")
Talaan ng mga Nilalaman:
- May -akda John Day day@howwhatproduce.com.
- Public 2024-01-30 13:12.
- Huling binago 2025-01-23 15:13.



Hie guys..
Naligaw ka na ba upang makagawa ng isang lupon ng labirint na maaaring makontrol Mula sa Iyong Android Smartphone …..!
Nasa tamang lugar ka. Bumuo ako ng isa para sa aking sarili gamit ang Arduino at android.
Huwag mag-alala madali,.. Sa proyektong ito ipapakita ko sa iyo kung paano gumawa:
1. Labyrinth Board (ginawa ko ito mula sa mga lumang kahoy na kahon na nakalatag).
2. Android app sa imbentor ng app para sa pagkontrol sa board.
3. Pagsulat ng programa sa Arduino para sa pagkontrol sa Lupon at
4. Pagse-set up ng circuit ….
Maaari mong magamit sa paglaon ang konseptong natutunan sa iba pang mga proyekto na iyong itatayo..
Kaya't nang hindi nag-aaksaya ng anumang oras, magsimula ….!
Hakbang 1: Pagtitipon sa Mga Bahagi



Para sa proyektong ito kakailanganin mo ang mga sumusunod na item:
1. Dalawang servo motor (gumamit ako ng mga mini at nagtrabaho sila para sa akin).
2. Arduino Uno. (Iminumungkahi kong bilhin ito mula sa snapdeal, ito ay isang clone ngunit sulit sa bawat sentimo na ginastos ko)
3. Isang module ng Bluetooth.
4. Isang Breadboard.
5. Ang ilang mga jumper wires
6. Manipis na kahoy o matitigas na mga board
7. mga kuko, ilang mga key rods mula sa mga lumang keyboard
8. Thermocol (Polystyrene)
Hakbang 2: Paggawa ng Labyrinth Board



Ito ang mekanikal na bahagi ng proyekto..
Una para sa base kumuha ng mahabang rektang piraso ng kahoy na plank o karton. dapat itong mas malaki kaysa sa aktwal na tilting board..
Gupitin ang dalawang maliit na pantay na sukat ng cuboid na kahoy..
at magdagdag ng isang kuko sa bawat isa, sa paraang sila ay aline sa parehong taas mula sa base. Gupitin din ang ilang dagdag na piraso ng kahoy upang idagdag bilang isang suporta sa mga haligi..
ngayon para sa nangungunang board..
gumawa ng isang frame na mas maliit kaysa sa base, ito ang magiging x axis namin, sa labas ng mukha ng mas maliit na mga gilid ng frame gumawa ng maliliit na butas sa gitna mismo ng mga gilid. gupitin ang mga tungkod sa kalahati at idikit ito sa malalaking gilid ng frame na nakaharap sa loob. gupitin ang mga ito sa kalahati bago gawin ito.
hahawak nito ang tuktok na board sa frame at makakatulong sa pag-ikot.
idagdag ngayon ang mga haligi sa panlabas na mga butas upang mapatayo ang frame sa base.
idikit ang mga haligi sa base at ilakip din ang mga suporta sa kanila.
ngayon upang idagdag ang mga motor ng servo.
ang isa ay ikakabit sa base at ikakabit sa frame gamit ang isang maliit na pamalo upang paikutin ang frame
ang isa pa ay mai-nakakabit sa frame at ikakabit sa tuktok na Lupon gamit ang isang maliit na tungkod upang paikutin ang tuktok na board.
ang mga servos ay dapat na mai-mount patayo sa bawat isa tulad ng ipinakita sa mga larawan.
ngayon ay handa na ang board.
ginawa ko ang maze gamit ang thermocol at isang card board.
Hakbang 3: Pag-set up ng Circuit

I-set up ang circuit tulad ng ipinakita sa pic…
Tandaan para sa mga servos na ginagamit ko ang pulang kawad ay positibo, ang kayumanggi ay negatibo at ang kahel ay signal.
Module ng Bluetooth
Pumunta si Rx sa pin 1
Pumunta si Tx sa pin 0
Ang signal ng wire ng base servo ay pupunta sa pin 5
Ang signal ng wire ng frame na servo ay pupunta sa pin 6
Alalahanin na magdagdag ng karagdagang suplay ng kuryente para sa servo at bluetooth module.. ang iba pang matalinong module ay hindi nakakakuha ng sapat na kasalukuyang at patuloy na magdidiskonekta, na nagpapakita ng error 516. Nagkaroon ako ng maraming problema sa pagto-troubleshoot nito at sa huli ay nalaman ang problema at ang solusyon.
Hakbang 4: Paggawa ng App


Okay una sa lahat kailangan mong mag-login sa imbentor ng app para sa paggawa ng anumang mga app..
pumunta sa
at mag-click sa Lumikha ng app! na sa kanang sulok sa itaas, mag-sign up at handa ka nang pumunta ….
Lahat ng iba pa na naipakita ko sa video.. tingnan mo.
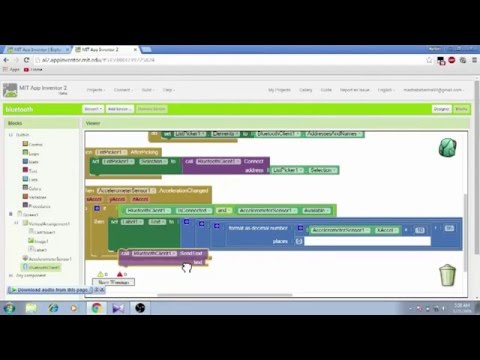
narito ang pangunahing:
kapag ang screen ay naisugod sa app (Alin sa kasong ito ang Screen1), -Ang accelerometerSensor Ay pinagana at ang pagiging sensitibo ay nakatakda sa max i.e 3.
ngayon kapag pinindot namin ang tagapili ng listahan
-Isang listahan ang pop up, na naglilista ng mga ipinares na aparato.
(kakailanganin mong ipares ang module bago buksan ang app, tulad ng normal na ang code ng pares ay 1234)
Ngayon bago pumili ng tagapili ng listahan, -itakda ang listahan sa mga ipinares na aparato at kanilang mga address
Pagkatapos mong piliin ang aparato
-ang Bluetooth adapter ay makakonekta sa napiling aparato
Ngayon ang module ay konektado
Ngayon kapag binago ang data ng acclerometerSensor
-Add ang data sa teksto ng label at ipadala ito gamit ang pagpapadala ng bluetooth.
Ngayon ang nakakalito na bahagi ay nagpapadala ng dalawang data nang paisa-isa
Ang data ng # acclerometer ay mula sa 0 hanggang 9.5 kapag ikiling ang kaliwa at 0 hanggang -9.5 kapag ikiling sa kanan, ganoon din ang nangyayari kapag ang telepono ay ikiling sa ibaba at pataas na mga ward..
kaya mayroon kaming x at y axis Pagkiling data na kailangan naming ipadala…
hayaan ang data ng x axis maging X at y axis maging Y
kaya ang ginawa ko ay ito:
Text = "(X * 10 (alisin ang mga decimal point pagkatapos nito) +95) * 1000 (multiply with 1000) + Y * 10 (alisin ang decimal point) +95"
kaya ngayon ang mga saklaw ng data mula 0 hanggang 190 para sa bawat axis at idinagdag upang gawing 190180 kung saan ang unang 3 digit ay x axis at ang huling 3 ay y axis coordinate …
na ipapadala sa module ng Bluetooth at masisira sa aktwal na mga datas at mapa na may mga anggulo ng pag-ikot ng servo sa arduino code…
Hakbang 5: Pagsulat ng Arduino Code


Matapos makumpleto ang app ay magsisimula ka sa code na na-upload ko ang code na i-download ito, ipunin at ipadala ito sa arduino ngunit maghintay bago mo ipadala ang code na tanggalin ang mga rx at tx pin ng bluettoh module mula sa arduino board.. at ipadala ang code pagkatapos nito maaari mong ilakip ang mga pin pabalik..
ang code na natanggap mula sa bluetooth ay isang string na mayroong aming mga axis datas..
ngayon Serial.parseInt (); ay ginagamit upang basahin ang string at i-convert ang string sa int sa isang variable pos.
Ngayon ang pos ay may halaga = 190180 (sabihin natin) ang aming layunin ay ngayon upang mai-decrypt ang data na ie alisin ang x axis at y coordinate
para sa x axis. hatiin ang halaga sa pamamagitan ng 1000, magbibigay ito ng 190.i.e na halaga / 1000 = 190
at para sa y axis modular hatiin ang halaga sa pamamagitan ng 1000, na magbibigay sa amin ng 180 i.e na halaga% 1000 = 180
kalkulahin ngayon ang max at min na posisyon ng mga servos na nais mo para sa Pagkiling ng board, … sa aking kaso nito ang 180 at 75 at….
Ngayon nakuha namin ang x at y axis na pinag-ugnay,, ngayon lamang namin na mapa ang mga coordinate sa mga min at max na mga anggulo ng pag-ikot na gusto namin para sa aming mga servo ….
tingnan ang code para sa mga detalye.
At tapos na kami … i-upload ang code, buksan ang app na kumonekta at maglaro….
Alam mo bang ang google ay may ginawa para sa sarili nito at isang napakalaking labirint na nakita mo … na kung saan ay ang aking pagganyak din sa pagbuo ng isa para sa aking sarili.
Kaya hanggang sa susunod, magsaya..
Inirerekumendang:
Arduino: Mga Programang Oras at Remote Control Mula sa Android App: 7 Mga Hakbang (na may Mga Larawan)
")
Arduino: Mga Program sa Oras at Remote Control Mula sa Android App: Palagi kong naisip kung ano ang nangyayari sa lahat ng mga board ng Arduino na hindi kailangan ng mga tao matapos nilang matapos ang kanilang mga cool na proyekto. Ang katotohanan ay medyo nakakainis: wala. Naobserbahan ko ito sa bahay ng aking pamilya, kung saan sinubukan ng aking ama na magtayo ng kanyang sariling bahay
Arduino Pocket Game Console + A-Maze - Maze Game: 6 Hakbang (na may Mga Larawan)
")
Ang Arduino Pocket Game Console + A-Maze - Maze Game: Maligayang pagdating sa aking unang itinuro! Ang proyekto na nais kong ibahagi sa iyo ngayon ay ang Arduino maze game, na naging isang pocket console na may kakayahang Arduboy at mga katulad na Arduino based console. Maaari itong mai-flash gamit ang aking (o iyong) mga laro sa hinaharap salamat sa expo
Pag-hack sa TV Tuner upang Basahin ang Mga Larawan sa Daigdig Mula sa Mga Satellite: 7 Mga Hakbang (na may Mga Larawan)
")
Pag-hack sa TV Tuner upang Basahin ang Mga Larawan sa Daigdig Mula sa Mga Satellite: Mayroong maraming mga satellite sa itaas ng aming mga ulo. Alam mo ba, na ang paggamit lamang ng Iyong computer, TV Tuner at simpleng DIY antena Maaari mong matanggap ang mga pagpapadala mula sa kanila? Halimbawa ng mga real time na larawan ng mundo. Ipapakita ko sa iyo kung paano. Kakailanganin mo ang: - 2 w
Pasadyang Arduino upang Panatilihing MAAARI ang Mga Pindutan sa Mga Manibela na May Bagong Car Stereo: 9 Mga Hakbang (na may Mga Larawan)
")
Pasadyang Arduino upang Panatilihin ang CAN Steering Wheel Buttons Sa Bagong Car Stereo: Napagpasyahan kong palitan ang orihinal na stereo ng kotse sa aking Volvo V70 -02 ng isang bagong stereo upang masisiyahan ako sa mga bagay tulad ng mp3, bluetooth at handsfree. Ang aking kotse ay may ilang mga kontrol sa manibela para sa stereo na nais kong magamit pa rin.
Mga Lightsaber na Nakabatay sa Arduino Na May Magaang at Mga Epekto ng Tunog: 14 Mga Hakbang (na may Mga Larawan)
")
Batay sa Arduino Lightsaber Na May Mga Magaan at Tunog na Mga Epekto: Kamusta jedi! Ang itinuturo na ito ay tungkol sa paggawa ng isang lightsaber, na ang hitsura, tunog at pagganap tulad ng isa sa pelikula! Ang pagkakaiba lamang - hindi ito maaaring mag-cut metal: (Ang aparatong ito ay batay sa platform ng Arduino, at binibigyan ko ito ng maraming mga tampok at pag-andar, ito