")
Talaan ng mga Nilalaman:
- Hakbang 1: Paano Ito Gumagana
- Hakbang 2: Mangyaring Tandaan Bago Magsimula
- Hakbang 3: Ipunin ang Lahat ng Materyal
- Hakbang 4: Mga Dimensyon ng Variuos
- Hakbang 5: Paggawa ng Katawan
- Hakbang 6: Actuator Assembly at Plate Fabrication
- Hakbang 7: Pagwawasto ng Mga Katangian ng Wave
- Hakbang 8: Mga Koneksyon sa Elektronik at Programa
- Hakbang 9: Pagkontrol sa mga Actuator sa pamamagitan ng Program na Pinatakbo ng Menu
- Hakbang 10: Paano Paandarin ang Wave Tank
- May -akda John Day day@howwhatproduce.com.
- Public 2024-01-30 13:14.
- Huling binago 2025-01-23 15:13.



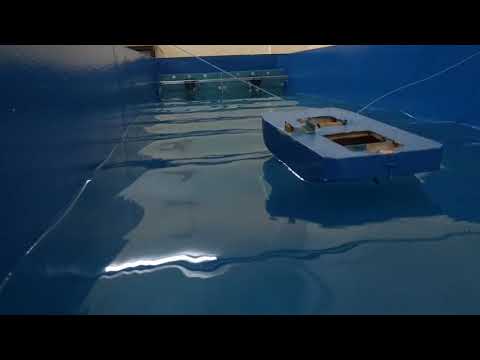
Ang isang tanke ng alon ay isang pag-set up ng laboratoryo para sa pagmamasid sa pag-uugali ng mga alon sa ibabaw. Ang tipikal na tanke ng alon ay isang kahon na puno ng likido, karaniwang tubig, na iniiwan ang bukas o puno ng puwang na puwang sa itaas. Sa isang dulo ng tanke ang isang actuator ay bumubuo ng mga alon; ang kabilang dulo ay karaniwang may isang alon na sumisipsip ng alon.
Karaniwan ang mga tank na ito ay nagkakahalaga ng maraming pera kaya't sinubukan kong gumawa ng isang talagang talagang murang solusyon para sa mga mag-aaral na nais gamitin ang tangke para sa pagsubok sa kanilang mga proyekto.
Hakbang 1: Paano Ito Gumagana
Kaya't ang proyekto ay binubuo ng dalawang actuators na ginawa gamit ang v-slot extrusions ng aluminyo.
Ang isang stepper motor ay konektado sa bawat actuator at ang parehong mga motor ay kinokontrol ng parehong stepper motor drive kaya't walang pagkahuli.
Ginagamit ang Arduino upang makontrol ang driver ng motor. Ang isang menu na hinimok ng menu ay ginagamit upang magbigay ng input sa arduion na konektado sa pamamagitan ng pc. Ang mga plate ng actuator ay naka-mount sa v-slot gantry na magbabalik-balik sa sandaling magsimula ang mga motor at ang pabalik-balik na paggalaw ng mga plate ay bumubuo ng mga alon sa loob ng tangke. Ang taas ng alon at haba ng alon ay maaaring mabago sa pamamagitan ng pagbabago ng bilis ng motor sa pamamagitan ng arduino.
Hakbang 2: Mangyaring Tandaan Bago Magsimula

Hindi ko natakpan ang karamihan sa mga maliliit na bagay kung paano gamitin ang arduino o kung paano gumawa ng hinang upang panatilihing maliit at madaling maunawaan ang tutorial na ito. Karamihan sa mga nawawalang bagay ay malilinaw sa mga imahe at video. Mangyaring ipadala sa akin ang mensahe kung mayroong anumang mga problema o mga katanungan tungkol sa proyekto.
Hakbang 3: Ipunin ang Lahat ng Materyal
- Arduino micro contoller
- 2 * Stepper motor (2.8 kgcm torque bawat motor)
- 1 * Stepper motor Driver
- 2 * V slot gantry system
- Mga plate na bakal o bakal para sa katawan ng tangke
- L-stiffeners upang suportahan ang katawan
- Fiber o plastic sheet upang gawing plate ng actuator
- Mga wire na 48 volt DC supply ng kuryente
Hindi ko isinama ang mga materyales para sa v-slot gantry sapagkat ang listahan ay magiging napakalaking pagkatapos lamang sa google v-slot makakakuha ka ng maraming mga video tungkol sa kung paano ito tipunin ginamit ko ang 2040 aluminyo na pagpilit. Ang kapasidad ng motor at kapasidad sa supply ng kuryente ay magbabago kung nais mong magdala ng higit na karga.
Mga sukat ng tank
Haba 5.50 m
Lapad 1.07 m
Lalim 0.50 m
Hakbang 4: Mga Dimensyon ng Variuos



Upang gawing mas simple ang mga bagay at mas maikli ang tutorial kumuha ako ng mga imahe ng iba't ibang mga bahagi na may isang sukat upang makita mo ang laki ng mga ito.
Hakbang 5: Paggawa ng Katawan




Ang katawan ay ginawa ng 3 mm makapal na sheet ng cast iron.
Ang lapad ng tanke ay 1.10 metro, haba 5 metro at taas 0.5 metro.
Ang katawan ng tanke ay binubuo ng banayad na bakal na may mga tigas sa paligid nito saanman kinakailangan. Ang mga banayad na bakal na plato ay baluktot at gupitin sa iba't ibang mga seksyon ayon sa mga sukat ng tangke. Ang mga seksyon na ito ay pagkatapos ay itinayo sa pamamagitan ng hinang ang mga ito nang magkasama. Ang mga stiffeners ay hinangin din nang magkasama upang gawing mas malakas ang istraktura.
Ang unang plato ay baluktot sa nais na laki sa iba't ibang mga seksyon at pagkatapos ang mga seksyon na ito ay pinagsama upang maitayo ang katawan. Ang mga stiffeners ay idinagdag bilang isang suporta ng mga sukat ng tigas ng suporta ay ipinapakita sa larawan
Hakbang 6: Actuator Assembly at Plate Fabrication



ang mga actuator ay ginawa gamit ang mga v-slot system. Ang mga ito ay talagang mura at madaling mabuo maaari mo itong i-google online kung paano tipunin ang isa sa mga ito. Gumamit ako ng lead screw sa halip na belt drive upang madagdagan ang kapasidad sa pagdadala. Hindi ko isinama ang tutorial sa pagpupulong sapagkat magbabago ito alinsunod sa kargang nais mong dalhin. Para sa akin ang karga sa maximum na bilis ay sa paligid ng 14Kg.
Ang plate ng actuator ay binuo gamit ang frp sheet, maaari ring magamit ang acrylic. Ang isang frame na hindi kinakalawang na asero ay itinayo upang suportahan ang sheet na frp.
Paddle frame
Ang frame ng sagwan ay binubuo ng hindi kinakalawang na asero. Ang hindi kinakalawang na asero ay patunay ng tubig at sa gayon ay lalabanan ang kaagnasan. Ang seksyon ng parisukat na 2 x 2 cm ay ginamit para sa frame ng sagwan. Ang isang matibay na frame ay kinakailangan dahil ang maraming cyclic load ay magiging aksyon sa sagwan sa panahon ng pagbuo ng alon. Ang frame ng bakal ay hindi yumuko at sa gayon ay makakabuo ng regular na alon ng sinusoidal.
Ginawa ang isang pasadyang L-clamp upang ikonekta ang actuator plate na may gantry plate sa vslot system.
Hakbang 7: Pagwawasto ng Mga Katangian ng Wave



Ang tangke ay maaaring makabuo ng iba't ibang taas ng alon ayon sa kinakailangan. Upang makabuo ng iba't ibang taas ng alon na RPM ng motor ay nababagay. Upang makakuha ng malaking alon taas RPM ng motor ay nadagdagan ito aslo bawasan ang wavelenght ng alon. Ang similary upang madagdagan ang wavelength RPM ng motor ay nabawasan. Maaaring ayusin ang RPM sa pamamagitan ng pagpili ng pasadyang pagpipiliang RPM mula sa menu.
Maximum na RPM = 250
Minimum na RPM = 50
Nasa ibaba ang halimbawa ng iba't ibang taas ng alon na naitala ng accelerometer. Ang unang imahe ay ang data na naitala sa mataas na RPM bilang isang resulta nakakuha kami ng mataas na taas ng alon. Ipinapakita ng pangalawang imahe ang nabawasan na taas ng alon at nadagdagan ang haba ng daluyong ng grap na ang data na naitala ng acceleromerter at kumakatawan sa aktwal na mga katangian ng alon ng nabuong alon.
Hakbang 8: Mga Koneksyon sa Elektronik at Programa

Habang kumokonekta sa power supply maging maingat sa koneksyon polarity ikonekta ang positibong terminal sa positibo at negatibo sa negatibo. Gawin ang mga koneksyon para sa motor at driver tulad ng ipinakita sa imahe. Kapag ang lahat ng mga koneksyon ay tamang ikonekta ang mga microcontroller pin (8, 9, 10, at 11) sa stepper motor driver. Ikonekta ang microcontroller sa isang PC sa pamamagitan ng isang USB. Simulan ang Arduino IDE> Serial monitor.
Ang Programa ay kasama sa tutorial at nagpapaliwanag sa sarili na gumagamit ito ng switch case at kung iba pa ang mga pahayag upang gumana. Ang simple lamang nito na maunawaan ito ng isang mag-aaral sa high school.
Narito ang link ng google drive sa programa
Programa sa pagkontrol ng Arduino
Hakbang 9: Pagkontrol sa mga Actuator sa pamamagitan ng Program na Pinatakbo ng Menu

Kapag ang microcontroller ay konektado nang maayos sa PC magkakaroon ka ng katulad na menu. Upang mapili ang pagpipilian i-type lamang ang numero sa tabi ng pagpipilian at pindutin ang enter
Halimbawa: -
Upang mapili ang "Actuate at maximum frequency" type 1 at pindutin ang enter.
Upang ihinto ang uri ng pagkilos 0 at pindutin ang enter.
Huminto sa emergency
Upang ihinto ang actuator pindutin ang zero "0" at ipasok.
Upang makagawa ng isang emergency na hinto alinman sa pindutin ang reset sa microcontroller o putulin ang supply ng kuryente.
Hakbang 10: Paano Paandarin ang Wave Tank

Ang tangke na ito ay ginawa bilang isang bahagi ng aking pangunahing proyekto. Ang tangke ay nasubukan para sa pagbuo ng iba't ibang mga regular na alon sa kondisyon ng ulo ng dagat para sa isang naka-scale na modelo ng barge. Ang pagsubok ng flume ng alon ay matagumpay. Ang pangkalahatang gastos para sa pagpapaunlad ng proyektong ito ay Rs. 81, 000 (Walong Isang Libo Lamang) sa tagal ng dalawang buwan.
Para sa anumang mga katanungan mangyaring magbigay ng puna.

Unang Gantimpala sa Paligsahan sa Tubig
Inirerekumendang:
Paano Ligtas na Natatanggal ang Mga Elektronikong Mga Bahagi para sa Muling Paggamit: 9 Mga Hakbang (na may Mga Larawan)
")
Paano Ligtas na Natapos na Mga Elektronikong Mga Bahagi para sa Muling Paggamit: Kumusta! Ako ay isang electronics nerd, kaya gusto kong maglaro ng iba't ibang mga elektronikong sangkap sa aking mga proyekto. Gayunpaman, maaaring wala akong palaging mga sangkap na kailangan ko upang matapos ko ang aking trabaho. Minsan mas madali itong hilahin ang mga sangkap na kailangan ko mula sa isang lumang elektronikong
Pagdidisenyo ng PCB at Paghiwalay ng Paggamit ng Paggamit lamang ng Libreng Software: 19 Hakbang (na may Mga Larawan)
")
Pagdidisenyo at Pag-iisa ng PCB Paggamit ng Tanging Libreng Software: Sa Instructable na ito ipapakita ko sa iyo kung paano mag-disenyo at gumawa ng iyong sariling mga PCB, eksklusibong gumagamit ng libreng software na tumatakbo sa Windows pati na rin sa isang Mac. Mga bagay na kailangan mo: computer na may koneksyon sa internet cnc galingan / router, mas tumpak ang pusta
Paggamit ng Mga Sensor ng Temperatura, tubig-ulan, at panginginig sa isang Arduino upang Protektahan ang Mga Riles: 8 Hakbang (na may Mga Larawan)
")
Paggamit ng Temperature, Rainwater, at Vibration Sensors sa isang Arduino upang Protektahan ang Mga Riles: Sa modernong lipunan, ang pagtaas ng mga pasahero sa riles ay nangangahulugang ang mga kumpanya ng riles ay dapat gumawa ng higit pa upang ma-optimize ang mga network upang makasabay sa pangangailangan. Sa proyektong ito ipapakita namin sa isang maliit na sukat kung paano ang temperatura, tubig-ulan, at mga sensor ng panginginig ng boses
Program Pro-mini Paggamit ng Uno (Mga Pangunahing Kaalaman sa Arduino): 7 Mga Hakbang (na may Mga Larawan)
: 7 Mga Hakbang (na may Mga Larawan)")
Program Pro-mini Paggamit ng Uno (Mga Pangunahing Kaalaman sa Arduino): Hai lahat, Sa itinuturo na ito nais kong ibahagi sa iyo ang aking karanasan sa aking kamakailang biniling Arduino pro-mini at kung paano ko na-upload ang code dito sa unang pagkakataon, gamit ang aking ang lumang Arduino Uno. Angrduino pro-mini ay may mga sumusunod na tampok: Ito ay
Project ng Score Board Na May P10 LED Display Paggamit ng DMD: 6 Mga Hakbang (na may Mga Larawan)
")
Project ng Score Board Na May P10 LED Display Paggamit ng DMD: Kadalasan ay nagkikita kami sa isang soccer stadium; mayroong isang higanteng LED board na nagsisilbing isang scoreboard. Gayundin sa iba pang larangan ng palakasan, madalas din nating alam ang scoreboard ng display screen na gawa sa LED. Bagaman hindi posible, mayroon ding larangan na tayo pa rin