")
Talaan ng mga Nilalaman:
- Hakbang 1: Panoorin ang Gumagawa ng Aking Proyekto
- Hakbang 2: Kunin ang Lahat ng Materyal
- Hakbang 3: I-upload ang Program sa Arduino Board
- Hakbang 4: Itabi ang Mga Track at Gawin ang Layout
- Hakbang 5: Ang Isang Circuit Schematic Ay Palaging Nakatutulong
- Hakbang 6: Ikonekta ang Mga Turnout sa Output ng L298N Driver Board
- Hakbang 7: Ikonekta ang Track ng Power Feeder sa Iba Pang Output ng L298N Driver Board
- Hakbang 8: Ikonekta ang L298N Driver Board sa Mga Power Pins ng Arduino Board
- Hakbang 9: Ikonekta ang Sensor sa Arduino Board
- Hakbang 10: Ikonekta ang Mga Pin ng Input ng Motor Driver sa Arduino Board
- Hakbang 11: Ilagay ang Riles sa Mga Track
- Hakbang 12: Palakasin ang Pag-setup
- Hakbang 13: TAPOS NA
- May -akda John Day day@howwhatproduce.com.
- Public 2024-01-30 13:11.
- Huling binago 2025-01-23 15:12.

Ang paggawa ng mga layout ng modelo ng tren ay isang mahusay na libangan, sa pag-automate nito ay gagawin itong mas mahusay! Tingnan natin ang ilan sa mga pakinabang ng pag-automate nito:
- Pagpapatakbo ng murang gastos: Ang buong layout ay kinokontrol ng isang Arduino microcontroller, gamit ang isang L298N motor driver, ang kanilang gastos ay halos wala kumpara sa tradisyonal na mga throttle ng kontrol ng tren at mga power pack.
- Mainam na ilagay sa isang display: Dahil walang kinakailangang panghihimasok ng tao upang mapanatili ang isang kontrol sa layout, maaari mo itong gamitin sa isang display kung saan hindi mo laging naroroon upang makontrol ang tren at ang mga turnout.
- Mahusay para sa mga hobbyist ng microcontroller: Kung ikaw o nais na magsimula sa Arduino at programa, ito ay isang mahusay na proyekto para sa iyo na magsanay ng iyong mga kasanayan.
Kung interesado ka, maaari mo ring suriin ang nakaraang bersyon ng proyektong ito na mas simple pa.
Kaya, nang walang karagdagang pagtatalo, magsimula na tayo!
Hakbang 1: Panoorin ang Gumagawa ng Aking Proyekto


Hakbang 2: Kunin ang Lahat ng Materyal

Upang magsimula, tiyaking mayroon ka ng lahat ng mga sumusunod:
- Isang board ng Arduino microcontroller, UNO ang ginustong.
- Isang L298N dual H-bridge motor driver board.
- 6 male to male jumper wires.
- 7 lalaki hanggang babaeng jumper wires.
- Isang distornilyador.
- Isang 12 volt-DC power supply adapter.
- Isang segment ng track na may IR proximity sensor na nakakabit sa ilalim (gumamit ako ng isang Kato S62 track)
Hakbang 3: I-upload ang Program sa Arduino Board
I-download ang Arduino IDE mula dito kung wala ito sa iyong computer. Pagkatapos i-download at buksan ang ibinigay na file.
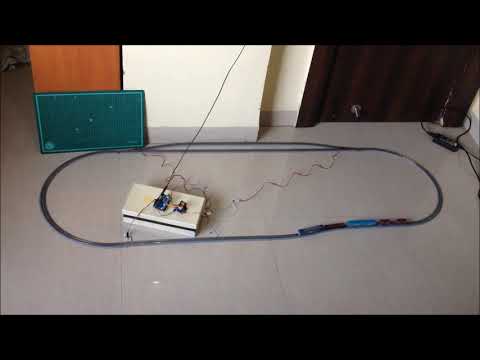
Hakbang 4: Itabi ang Mga Track at Gawin ang Layout

Gumawa ng isang hugis-itlog na loop na may dumadaan na panghaliling daan tulad ng ipinakita sa itaas. Tiyaking ang distansya sa pagitan ng track ng sensor at ang unang turnout na tatawid ang tren pagkatapos tumawid sa track ng sensor ay mas malaki kaysa sa haba ng tren na walang bahagi ng tren ang nasa track ng sensor kapag tumawid ito sa turnout.
Hakbang 5: Ang Isang Circuit Schematic Ay Palaging Nakatutulong

Mag-click sa imahe upang makakuha ng isang buong pagtingin. Siguraduhing dumaan ka sa buong iskema ng circuit at lahat ng mga detalye bago magpatuloy.
Hakbang 6: Ikonekta ang Mga Turnout sa Output ng L298N Driver Board




Ikonekta ang pula at ang itim na mga wire ng parehong mga turnout ayon sa pagkakabanggit sa bawat isa, na nagreresulta sa isang parallel na koneksyon. Pagkatapos, ikonekta ang mga pulang wires sa out4 at ang mga itim na wires sa out3 terminal ng board ng driver ng motor.
Hakbang 7: Ikonekta ang Track ng Power Feeder sa Iba Pang Output ng L298N Driver Board


Ikonekta ang puting kawad ng tagapagpakain ng kuryente sa out1 at ang asul na kawad sa out2 terminal ng board ng driver ng motor.
Hakbang 8: Ikonekta ang L298N Driver Board sa Mga Power Pins ng Arduino Board

Ikonekta ang 12-volt pin sa VIN pin ng Arduino board, ang GND pin sa GND pin ng Arduino board, at mas mabuti, ang 5-volt pin ng driver ng motor sa 5-volt pin ng Arduino board.
Hakbang 9: Ikonekta ang Sensor sa Arduino Board

Ikonekta ang VCC pin ng sensor sa 5-volt pin ng Arduino board, GND pin sa GND pin ng Arduino board, at ang OUT pin sa A0 pin ng Arduino board.
Hakbang 10: Ikonekta ang Mga Pin ng Input ng Motor Driver sa Arduino Board

Ikonekta ang mga digital na pin ng Arduino board sa mga input pin ng motor driver board tulad ng sumusunod:
- D9 hanggang IN1
- D10 hanggang IN2
- D11 hanggang IN3
- D12 hanggang IN4
Hakbang 11: Ilagay ang Riles sa Mga Track

Matapos suriin ang lahat ng mga koneksyon sa mga kable, ilagay ang tren sa panghaliling daan.
Hakbang 12: Palakasin ang Pag-setup

Patayin ang pag-set up at siguraduhin na ang mga turnout ay lumipat sa panghaliling daan, kung hindi pagkatapos ay baligtarin lamang ang mga koneksyon ng mga turnout na ginawa sa driver ng motor. Gayundin, tiyakin na ang tren ay nagsisimulang lumipat sa pasulong na direksyon. Baligtarin ang koneksyon ng track ng feeder sa driver ng motor kung gumagalaw ang tren sa maling direksyon.
Hakbang 13: TAPOS NA
Kumpleto ang proyekto, sa ngayon. Maaari kang mag-tinker gamit ang Arduino code upang baguhin ang pag-andar ng layout, magdagdag ng higit pang mga siding, lahat ng napapasadyang ito! Nais kong malaman tungkol sa anumang mga pagbabago na gagawin mo sa proyektong ito, ipaalam sa akin sa mga komento sa ibaba. Ang lahat ng mga pinakamahusay na!
Inirerekumendang:
Awtomatikong Model Railway Layout Pagpapatakbo ng Dalawang Tren (V2.0) - Batay sa Arduino: 15 Hakbang (na may Mga Larawan)
 - Batay sa Arduino: 15 Hakbang (na may Mga Larawan)")
Awtomatikong Model Railway Layout Pagpapatakbo ng Dalawang Tren (V2.0) | Batay sa Arduino: Ang pag-automate ng mga layout ng riles ng modelo na gumagamit ng Arduino microcontrollers ay isang mahusay na paraan ng pagsasama-sama ng mga microcontroller, programa at modelo ng riles sa isang libangan. Mayroong isang bungkos ng mga proyekto na magagamit sa pagpapatakbo ng isang tren autonomiya sa isang modelo ng railroa
Simpleng Awtomatikong Model Railway Layout - Kinokontrol ng Arduino: 11 Mga Hakbang (na may Mga Larawan)
")
Simpleng Awtomatikong Model Railway Layout | Kinokontrol ng Arduino: Ang mga Arduino microcontroller ay isang mahusay na karagdagan sa modelo ng riles ng tren, lalo na kapag nakikipag-usap sa awtomatiko. Narito ang isang simple at madaling paraan upang makapagsimula sa modelo ng automobile ng riles gamit ang Arduino. Kaya, nang walang anumang pag-aalinlangan, magsimula na tayo
Model Railout Layout With Automated Passing Siding (V2.0): 13 Hakbang (na may Mga Larawan)
: 13 Hakbang (na may Mga Larawan)")
Model Railout Layout With Automated Passing Siding (V2.0): Ang proyektong ito ay isang pag-update ng isa sa mga nakaraang proyekto ng modelo ng riles ng tren, Ang Model Railway Layout na may Automated Siding. Ang bersyon na ito ay nagdaragdag ng tampok ng pagkabit at pag-decoupling ng lokomotibo gamit ang rolling stock. Ang pagpapatakbo ng
Simpleng Automated Point to Point Model Model Riles na tumatakbo sa Dalawang Tren: 13 Hakbang (na may Mga Larawan)
")
Simpleng Automated Point to Point Model Model Railroad Running Two Trains: Ang mga Arduino microcontroller ay isang mahusay na paraan ng pag-automate ng mga layout ng modelo ng riles dahil sa pagkakaroon ng mababang gastos, open-source na hardware at software at isang malaking pamayanan upang matulungan ka. Para sa mga modelo ng riles, ang Arduino microcontrollers ay maaaring patunayan na isang gr
Automated Point to Point Model Riles Na May Siding Yard: 10 Hakbang (na may Mga Larawan)
")
Automated Point to Point Model Railroad With Yard Siding: Ang mga Arduino microcontroller ay nagbubukas ng maraming posibilidad sa modelo ng riles, lalo na pagdating sa pag-aautomat. Ang proyektong ito ay isang halimbawa ng naturang aplikasyon. Ito ay pagpapatuloy ng isa sa mga nakaraang proyekto. Ang proyektong ito ay binubuo ng isang poin