: 5 Hakbang")
Talaan ng mga Nilalaman:
- May -akda John Day day@howwhatproduce.com.
- Public 2024-01-30 13:14.
- Huling binago 2025-01-23 15:13.


Maligayang pagdating sa isang bagong proyekto !!!
Una sa mga bagay na talagang nais kong gumawa ng ilang mga katakut-takot na mata tulad ng ginagawa nila para sa mga costume at Halloween. Gustung-gusto ko ang mga espesyal na epekto at nais na malaman at bumuo ng aking sariling mga animatronic na mata gamit ang isang arduino, servos, at mga ping pong ball.
Hakbang 1:
Ipunin ang Mga Pantustos…
2 servo motor (sumama ako sa pinakamurang posible sa isang tindahan ng Hobby Town)
arduino uno (adafruit)
mga linkage rod (Hobby Town)
2 kalahating shaft (Hobby Town)
2 bola ng ping pong
mga konektor (Hobby Town)
Styrofoam Head (Michaels)
iba pang mga misc item…
Hakbang 1: Hakbang 2: Pagpinta ng Mga Mata


Para sa hakbang 2 nais kong magpatuloy at pintura ang mga eyeballs na ginawa ko mismo. Oo bahagyang nakaalis ang mga ito ngunit mula sa malayo ay mukhang mahusay sila! Kung mayroon kang anumang mga katanungan sa kung anong pintura ang ginamit ko mag-comment lamang sa ibaba at magtanong:)
Paggawa ng mga mata:
Mga materyal na kinakailangan:
4 maliit na manipis na mga brush ng pintura
pintura
Tisyu
Upang magawa ang mga mata ay magsimula ka sa dalawang bola ng ping pong at totoo lang gupitin ito sa kalahati gamit ang isang exacto na kutsilyo o isang pamutol ng kahon. Susunod na pintura ang mga ito ng puting base muna upang maitago ang anumang mga kakulangan. Pagkatapos nito simulan ang pagtula kung anong kulay ng mata ang sinusubukan mong makamit. Para sa akin gumamit ako ng berde at asul. Ang aking color palette ay berde, asul, puti, at itim.
Hakbang 2: Hakbang 3: Pagsasama-sama ng Batayan


Hakbang 3: Pagsasama-sama ng base
Mga materyal na kinakailangan:
mga sheet ng acrylic
random na piraso ng metal
mga turnilyo
kalahating shaft
nakita ng banda (hindi kinakailangan)
Una kong gupitin ang hugis at laki na gusto ko mula sa isang acrylic sheet. Pagkatapos ay pinutol ko ang mga metal na braket mula lamang sa isang piraso ng metal. Sa sandaling nakuha ko ang mga iyon sa kung saan ko nais ang mga ito, drill ko ang mga butas para sa mga turnilyo at ikinonekta ang mga braket sa base tulad ng ipinakita sa itaas sa imahe. Para sa isa sa aking mga servo kailangan kong gupitin ang isang maliit na hugis-parihaba upang matiyak na magkasya ito doon. Ito ay upang matiyak na ang mga ugnayan at lahat ay nakahanay nang maayos.
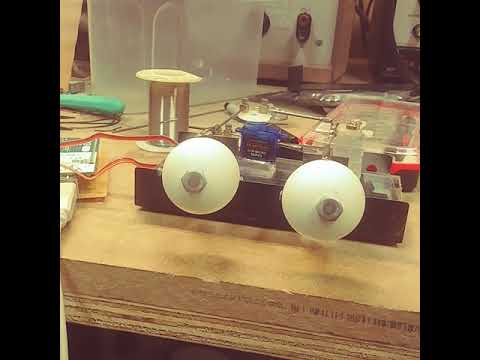
Hakbang 3: Hakbang 4: Paglalagay ng Mga Serbisyo at Mga Pag-link



Hakbang 4: Ang paglalagay ng mga servo at ugnayan
Mga materyal na kinakailangan:
2 servo
mga ugnayan
maliit na hiwa ng mga parisukat na acrylic
mga turnilyo
mga konektor
Para sa hakbang 4 na inilagay ko kung saan pupunta ang lahat at inilalagay ito. Upang matiyak na ang lahat ay nakaupo nang pantay at itinuro kailangan kong maglagay ng maliit na gupitin na mga piraso ng acrylic sa ilalim ng isa sa mga servo. Kailangan kong ilagay ang parehong dami ng mga piraso sa ilalim ng linkage na kumokonekta sa mata sa servo. Matapos ang mga ito ay ang lahat ng mga lugar at pandikit (kung ano man ang iyong pinili hangga't dumidikit ito) maaari mong ikonekta ang mga mata sa mga link at sa mga servo. Ang isang malapit dito ay ipinapakita sa itaas sa imahe 4. Isang tala lamang sa gilid kapag inilalagay ang mga servo at nai-link ang servo na pinakamalapit sa mga mata ay dapat itaas at pati na rin ang link na diretso sa tabi nito. Ito ay dahil ang isang paghila sa x-axis at ang iba pang isang paghila sa y-axis. Ito ang pinakamalaking hakbang at ang ilang mga bagay ay maaaring kailanganin na mai-tweak kahit na matapos mo na ang pagkonekta sa lahat.:)
Hakbang 4: HAKBANG SA CODE


Pagdaragdag ng code sa arduino !! Ang lugar sa itaas ay mga larawan ng code na ginamit para sa mga mata na ito. Nagdagdag ako sa isang joystick mula sa isang PS1 controller upang maging ang paraan ng pagkontrol ng mga mata.
Hakbang 5: Hakbang 5: ang Ulo




Ang hakbang na ito ay opsyonal at nangangailangan ng oras.
Hakbang 5: Paggawa ng ulo
Mga materyal na kinakailangan
Ulo ng styrofoam
exacto na kutsilyo
mainit na glue GUN
Ngayon para sa hakbang na ito ito ay opsyonal at tumagal ng oras. Malamang inabot ako ng 2 oras. Sa kasamaang palad ang aking kasosyo sa krimen ay aksidenteng nahulog ang proyekto at sinira ang ulo matapos akong matapos. Gayunpaman para sa mga ito ay naisip ko lamang kung gaano kalalim ang kailangan kong gupitin mula sa ilalim pati na rin sa tuktok. Ang pinakamahalagang bahagi ay ang mga mata na kailangan nila ng sapat na silid upang makagalaw at makulong, tulad ng nakikita mo sa larawan 5. Ang batayang acrylic na pinili kong gawin ay dumikit sa gilid tulad ng nakikita mo sa larawan 6. Maaari itong masakop ng tulad ng muffs ng tainga o isang bagay na nakakatawa tulad ng isang peluka sa iyo!
Tapos TADDAAAAA !!!!!! tapos ka na sa proyektong ito.
Sana magustuhan mo ito at magkomento sa ibaba kung mayroon kang anumang mga katanungan o anumang itanong lamang:)
Inirerekumendang:
Arduino Paano Kumonekta sa Maramihang Mga Servo Motors - Tutorial sa PCA9685: 6 na Hakbang

Arduino Paano Kumonekta sa Maramihang Mga Servo Motors - Tutorial sa PCA9685: Sa tutorial na ito matututunan namin kung paano ikonekta ang maraming mga servo motor gamit ang PCA9685 module at arduino. Ang module ng PCA9685 ay napakahusay kapag kailangan mong kumonekta ng maraming mga motor, maaari mong mabasa ang tungkol dito dito https : //www.adafruit.com/product/815Panoorin ang Vi
Isang Natatanging Modelo ng Orasan na Pinapagana ng Arduino Servo Motors: 5 Hakbang

Isang Natatanging Modelo ng Orasan na Pinapagana ng Arduino Servo Motors: Sa Instructable na ito ay ipapakita ko sa iyo kung paano lumikha ng isang Clock gamit ang Arduino Nano at Servo motors. Upang magawa ito kakailanganin mo ang mga sumusunod na item
Animatronic Eyes With Remote Control: 5 Hakbang

Animatronic Eyes With Remote Control: Ito ay isang tagubilin kung paano lumikha ng Mga Animatronic na Mata na maaaring malayo makontrol mula sa computer sa paglipas ng WiFi. Gumagamit ito ng minimum na mga elektronikong sangkap, walang PCB, at nangangailangan ng minimum na paghihinang. Maaari mong kontrolin ito mula sa PC keyboard, kaya hindi mo kailangan ng isang
Pagkontrol sa 3 Mga Servo Motors Na May 3 Potentiometers at isang Arduino: 11 Mga Hakbang (na may Mga Larawan)
")
Pagkontrol sa 3 Mga Servo Motors Na May 3 Potentiometers at isang Arduino: Kumusta. Ito ang aking kauna-unahang itinuro, kaya inaasahan kong maging matiyaga ka sa akin kung magkamali ako sa pag-set up nito. Ito ay nakasulat para sa mga nagsisimula, kaya ang mas advanced sa iyo ay maaaring laktawan ang marami sa mga ito at makarating lamang ito sa kable. Ang layunin na itinakda ko sa aking
Animatronic Mask Na May Moving Eyes: 13 Hakbang (na may Mga Larawan)
")
Animatronic Mask With Moving Eyes: Kumusta! Para sa isang takdang-aralin sa paaralan kailangan naming tuklasin ang Arduino. Kaya't nagpasya akong gumawa ng animatronic mask. Ito ay mas katulad ng isang dekorasyon sa dingding. Ang buong pag-andar nito ay upang gawing hindi magulo ang mga tao, dahil ang mga mata ay gumagalaw. Ito ay inspirasyon ng ika